誤差数センチ! 超高精度RTK測位を低価格で実現するGNSS受信小型モジュール:10万円以上で大型だったが、モジュールサイズで半額以下に!!
GPSなどGNSSで、誤差数センチの高精度測位を実現するモジュールが登場した。これまで大掛かりなシステムが必要だった高精度測位を大幅に小型化、低価格化するソリューションであり、農機や建機、ドローンなど幅広い産業分野に、多くの革新をもたらすことになりそうだ。
重要性高まる“位置検出”
IoT(モノのインターネット)に代表されるように、あらゆる機器/モノのスマート化、インテリジェント化が進んでいる。これまで人の手を介して制御されてきた機器やモノは次第に、自律的に動作していくトレンドにある。自動運転車やドローンなどが自律制御機器の端的な例だろう。他にも農機や建機などで自律制御/自律運転に向けた技術開発が活発になっている。
こうしたさまざまな機器で自律制御/自律運転を実現するために不可欠なテクノロジーの1つが、位置情報取得技術だ。当たり前だが、機器自身が自己の位置を把握しない限り、自律的に目的の位置へ移動することは不可能だ。
位置情報を取得するための手段としてさまざまな技術が存在するが、最もポピュラーな位置情報取得技術は、衛星測位システム(GNSS:Global Navigation Satellite System)だろう。GNSSの代表格であるGPS(Global Positioning System/全地球無線測位システム)は、自動車のカーナビゲーションシステムの他、ほぼ全てのスマートフォンで利用されている。空の見える場所であれば、地球上のどこにいても、自己位置を把握できる利便性の高い技術として、広く普及している。
広く普及するGNSSだが、問題は“誤差”
測位技術として定着したGPSなどのGNSSだが、自律運転/自律制御を行う機器にとって完璧な位置情報取得技術とは言い難い。なぜなら、精度が足りないからだ。
GPSの他、GLONASS(グロナス)、Galileo(ガリレオ)といった運用が開始されているGNSSはいずれも、一般的な受信器を使用した場合、その測位精度は、±2~3mになる。主に地図上に自己の位置を表示するカーナビやスマホといった用途の場合、3mの誤差が生じても、利用には大きな支障を来さない。カーナビなどでは、地図情報や走行状態を加味して測位情報を補正する処理も行えるため、2~3mの誤差は問題にはならないからだ。

しかし、クルマや農機、建機を自動運転させる場合、2~3mの誤差は、全く許容できない大きな誤差になる。クルマであれば、2~3mの測位誤差があれば、走行車線さえも把握できない。農機であっても、田植え機を自律運転させようとするならば、数センチ単位の間隔で稲を植え付けていく必要があり、メートル単位の誤差では使い物にならない。
そこで、自動運転車などでは、イメージセンサーやレーダー、モーションセンサーなどを活用し、障害物や白線などを検知し、高精度の相対位置を割り出し、ぶつからない自動運転車を実現。絶対位置については、高精度の相対位置情報を元に補正し利用している。
ただ、高精度の相対位置を求めるには多数のセンサーが必要になる。すなわち、システムのサイズ、重量、コスト、消費電力も増大させる。コスト要求の厳しい農機や建機といった業務用機器では、可能な限り搭載センサー数を減らしながら高精度の位置検出を行いたい。重量、消費電力が性能を大きくするドローンなどではなおさら、単純な手段で高精度の絶対位置検出を求めるニーズが強い。
誤差=数センチのGNSSが存在する!
実は、多くのセンサーを必要とせずに、GNSSだけで、誤差数センチレベルの測位が可能な技術が存在する。リアルタイムキネマティック(RTK:Real Time Kinematic)と呼ばれる技術だ。
GNSSは、電波を使い複数の測位衛星と受信器の距離を割り出し、位置を特定する仕組みだ。だが測位衛星から送られてくる電波は電離層や大気中の水分などの影響を受け、遅延が発生し、結果として測位に誤差を生んでしまう。こうしたGNSSの欠点を補う技術として開発されたのが、RTKだ。
 RTK GNSSのイメージ
RTK GNSSのイメージRTKの大きな特長は、2つ以上のGNSS受信器を用いる点にある。1つの受信器は、緯度経度という絶対位置を割り出した場所(既知点)に固定する固定局(基準局)として配置する。固定局では、衛星から受信した情報と、あらかじめ把握している絶対位置との差分を測定し、その差分情報を、別の受信器(測定局/移動局)に伝える。移動局は自身が測位衛星から受信した情報を、固定局から得た差分情報を元に補正を行ってより高い精度の位置を取得する。
詳しい補正メカニズムの説明は割愛するが、受信器に入ってくる搬送波(キャリア波)の位相などから、複雑な処理アルゴリズムを用いて、誤差を割り出し、補正する。RTKではそうした複雑な処理を受信器でリアルタイムに処理しなければならない。
RTKなど固定局を用いるGNSSは、船舶などで利用され、補正情報の伝送データ伝送用規格を米海上無線技術委員会(RTCM)が策定するなどし、一般化している。
RTKは“高根の花”
GNSSだけで、センチクラスの高精度測位を実現するRTKだが、農機や建機、ドローンといった幅広い産業分野で活用するには、多くの課題も存在する。
1つは、RTK対応GNSS受信器の価格だ。複雑な処理をリアルタイムで実施するには、大きなコンピューティング能力が必要になり、必然的に受信器は高価になる。現状、1台当たり100万円を超えるような受信器が一般的だ。最近では、一定の精度で価格を抑えた受信器も登場してきているが、10万円を切るような製品は見当たらないという。
また、受信器のサイズも小さくない。基本的には、ボックス型の“受信端末”が主流で、一部、ボード形状の受信器もあるが、“機器に手軽に組み込める”という小型受信器はない。
もう1つ大きな課題として、複雑なRTKの処理アルゴリズム(ソフトウェア)として、開発者責任が明確な商用アルゴリズムが存在していないことがある。現状のRTK対応受信器の多くは、一部のハイエンド機種を除いて、大学など研究機関が開発成果として公開しているオープンソースのアルゴリズムを利用している。そのため、アルゴリズムの内部までを含めた詳細なテクニカルサポートが提供されていない。こうしたことも、産業分野で、RTK GNSSを導入できない障壁として立ちはだかっているわけだ。
RTKをモジュールサイズで実現したu-blox
こうしたRTKの課題を解決したGNSS受信器が登場した。
産業機器/車載機器向けGNSSレシーバーモジュールの大手メーカーであるu-blox(ユーブロックス)が2016年2月に発表した「NEO-M8P」だ。
 センチ級測位精度を実現する表面実装型GNSSレシーバーモジュール「NEO-M8P」
センチ級測位精度を実現する表面実装型GNSSレシーバーモジュール「NEO-M8P」NEO-M8Pは、わずか12.2 ×16.0×2.4mmサイズの小型モジュール。開発評価用のNEO-M8P搭載アプリケーションボードの価格は、固定局版、移動局版ともに約2万円であり、これまでより半額以下の価格でRTK GNSSが導入できる。
機器に組み込みやすいサイズながらNEO-M8Pは、従来のボックス型製品に匹敵する性能、測位精度を実現する。
高性能なノイズ除去フィルターを搭載した高性能アンテナとアプリケーションボードを使用した場合の誤差は最小でわずか0.025m、すなわち、2.5cmの精度を実現可能にするのだ。価格が1000円程度の汎用アンテナを用いた場合でも、最小誤差は5cmだ。当然、固定局と移動局との距離に応じて、精度は異なり、「想定する実使用時の固定局と移動局との最大距離」という10km程度離れた場合には、高性能アンテナ使用時で、10cm程度の誤差になる。

アルゴリズムも自社開発!
こうした高い測位精度を実現するための補正処理アルゴリズムは、オープンソースを使用せず、u-bloxが自ら開発した独自アルゴリズムを採用。大きなコンピューティング能力を必要としない高効率なアルゴリズムを構築し、ARMコアプロセッサベースの小型低価格モジュールでRTK GNSSを実現。「ソースコードレベルから全てを把握しているため、プロフェッショナルレベルのテクニカルサポートも提供できる体制が整えられた」とする。
独自の補正アルゴリズムはコンパクトなだけでなく、産業用途に適した付加価値も提供する。
RTKでは、その補正方法から、電源投入後、一定時間、移動局を静止させて誤差を収束させる初期補正が必要になる。通常、初期補正には15分程度の時間が必要とされる。また、初期補正後も樹木などで空を遮られるなどし、測位衛星との通信が一時的に途絶えた場合、一定時間精度が悪化する。これに対し、u-bloxの独自補正アルゴリズムは、おおよそ3分程度で初期補正を終えることができ、測位衛星との通信が途絶えた場合にも、2分程度で最小誤差を実現する状況まで早期に回復できる性能を備える。「業務効率が重視される産業用途での使用に耐えうる数少ない高速な補正アルゴリズムに仕上がっている」と胸を張る。
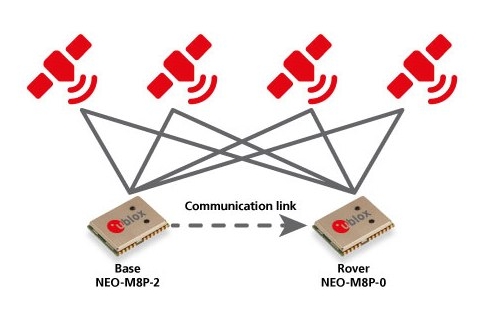 「NEO-M8P」の使用イメージ
「NEO-M8P」の使用イメージ固定局と移動局間で補正データをやりとりするRTCMプロトコル通信に必要な通信回線仕様は、他のRTK GNSSと同様、15kビット/秒(bps)以上だ。そのため、「特定小電力無線など免許不要で低コストに既存無線通信が使用できる」とする。また「固定局と移動局の距離が10km程度と広域でする場合には、携帯電話通信網を使うケースが多くなるだろう」とし、u-bloxはGNSSレシーバーモジュールとともに、製品展開する自社の携帯電話通信用モジュールと組み合わせた提案、サポートも提供する方針だ。
なお、1つの固定局に対し、移動局は「15kbpsの通信を確立できる限り、何台でも設置可能」とする。また、標準的なRTCMプロトコル規格を採用しており、同規格準拠の固定局ネットワークを使用することも可能だ。
 「NEO-M8P」の利用方法。固定局は、あらかじめ測位した正確な緯度経度情報を設定する方法以外にも、NEO-M8P自身で正確な緯度経度情報を測位する方法や、既にサービス提供されている第三者のRTCM規格準拠の固定局ネットワークを利用する方法もある (クリックで拡大)
「NEO-M8P」の利用方法。固定局は、あらかじめ測位した正確な緯度経度情報を設定する方法以外にも、NEO-M8P自身で正確な緯度経度情報を測位する方法や、既にサービス提供されている第三者のRTCM規格準拠の固定局ネットワークを利用する方法もある (クリックで拡大)発表直後から引き合い多数!
 日本法人代表の仲哲周氏
日本法人代表の仲哲周氏2月のNEO-M8Pのサンプル出荷および、アプリケーションボード販売開始を受けて、u-bloxの日本法人では、国内市場でのNEO-M8Pの提案活動を実施し始めたばかりだが「既に多くの問い合わせを得ている」という。
日本法人代表の仲哲周氏は「農機メーカーからは、“畑の盛り土をした畦(あぜ)に種をまくには、数センチレベルの測位システムが不可欠で、自動化が難しかった。だが、NEO-M8Pにより実現できるかもしれない”という期待の声をもらった」という。さらに「GNSS搭載が当たり前になりつつある建機分野でも、より精度の高い測位システムへのニーズが極めて高いようで、上々の評価を得ている」と語る。その他、u-blox日本法人では、ドローンやスポーツ器具など高精度測位要求の高いアプリケーションに対し、NEO-M8Pの提案を実施していくとしている。

なお、NEO-M8Pの量産出荷時期は2016年7~9月を予定。仲氏は「アプリケーションボードの価格が固定局版、移動局版、合せて約4万円であり、量産段階ではさらにモジュール価格を抑えて提供できる見込み。従来よりも大幅に低いコストでRTK GNSSを構築できる画期的なソリューション。幅広い用途で活用されることを期待している」。
提供:ユーブロックスジャパン株式会社
アイティメディア営業企画/制作:EE Times Japan 編集部/掲載内容有効期限:2016年3月31日
Copyright © ITmedia, Inc. All Rights Reserved.
スポンサーリンク
関連ビデオ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。