
コウモリは飛行ルートを“先読み”する、超音波で:ドローンなどの自律ロボットに応用へ(1/2 ページ)
同志社大学研究開発推進機構の藤岡慧明氏らは、コウモリが目前の獲物のみならず、次の獲物の位置も超音波で先読みすることで、より多くの獲物を確実に捕らえる飛行ルートを選択していることを発見した。アクティブセンシングで検知した複数の標的を効率的に捕捉するための軌道計画や、自律移動を要する飛行ドローンなどのロボット技術分野へ応用が期待される。
日本にも多く生息するアブラコウモリは、高度に発達した超音波ソナー(音によって物体を探知また測距する技術)の能力を持ち、体長数ミリメートルの蚊など微小な飛翔昆虫を正確に探知し、飛びながら次々と捕食を行う(獲物の捕食における時間間隔は、短いときには1秒未満という)。しかし、この高度な採餌行動を可能にするソナー情報と飛行ルートの関係は、これまで明らかにされていなかった――。
同志社大学研究開発推進機構の藤岡慧明氏らの研究グループは2016年4月12日、コウモリが目前の獲物のみならず、次の獲物の位置も超音波で先読みすることで、より多くの獲物を確実に捕らえる飛行ルートを選択していることを発見した。
飛行ルートに関する数理モデルを構築
同研究グループは、コウモリが2匹の獲物の位置情報に基づいて飛行方向を調整していると仮定し、飛行ルートに関する数理モデルを構築した(図1)。この数理モデルを用いることで、コウモリが次の獲物を意識して軌道を変化させているかどうか、2匹の獲物に対する“飛行制御に関する選択的注意”をパラメータとして分析できる。
数値シミュレーションの結果、飛行の選択的注意が双方の獲物に対して分散する場合に、最も高確率で双方の獲物を捕食できる飛行ルートになることが分かったとする。
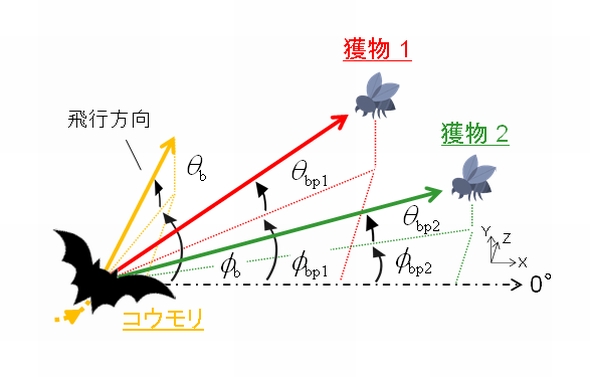 図1:コウモリの数理モデルを構築するための枠組み 出典:JST
図1:コウモリの数理モデルを構築するための枠組み 出典:JSTまた、同研究グループは、野外において大規模なマイクロフォンアレイシステムを用いて、野生コウモリの3次元飛行軌跡と超音波の放射方向を計測(図2)。この結果によると、実際にコウモリが連続して捕食を行うときは、ソナーの選択的注意が目前の獲物だけでなく、その次の獲物にも向けていることが分かったとしている(図2C)。
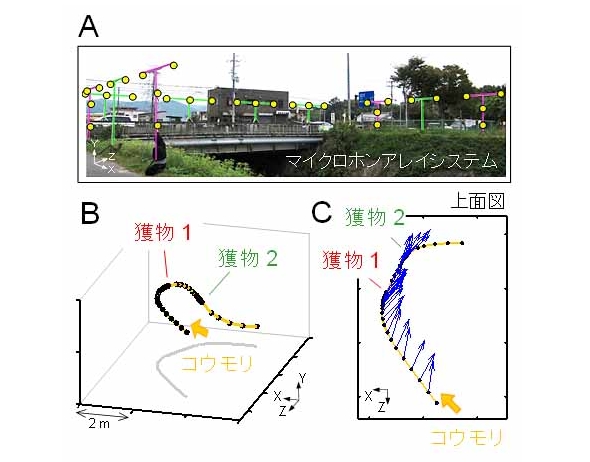 図2:マイクロフォンアレイシステムを用いた野生コウモリの3次元動態音響計測 出典:JST
図2:マイクロフォンアレイシステムを用いた野生コウモリの3次元動態音響計測 出典:JST具体的には、採餌飛行するコウモリの音声を32個のマイクロフォンで構成されたアレイシステムで録音する(図2A)。4基のY字型アレイユニット(図2A桃色部)で、コウモリの放射超音波の到達時間差を利用し、3次元飛行軌跡を構築する(図2B)。
マイクロフォンで録音したソナー音声の音圧差を利用することで、ソナーの選択的注意方向(図2Cの青色矢印)を計測。ソナーの選択的注意方向の推移を見ると、獲物1にアタックする前から獲物2の方向にソナーの選択的注意を向けていることが分かる。
Copyright © ITmedia, Inc. All Rights Reserved.
Special Contents
- PR -






スポンサーからのお知らせ
- PR -Special Contents 1
- PR -

Special Contents 2
- PR -




記事ランキング
- 「LiDARより高精度で低コスト」ソニーのエッジAI、スマート都市で真価
- まるでボタン、でも平ら リアルさを追求する京セラのハプティクス技術
- 高解像度で高精度のダイレクト露光装置を開発、25年度内に製品化
- 前工程装置でシェア低下が続く日本勢、気を吐くキヤノンは希望となるか
- 米国政府がIntel株を10%取得 元王者の救済は「国有化への序章」か?
- 「富岳NEXT」開発が始動 GPUでNVIDIA参画、Rapidus採用の可能性も
- シャープが亀山北工場を売却 12億円で
- NVIDIAとAMDが米政府に中国売上高の15%を支払い、影響は
- 25年2Qの半導体企業ランキング、日本勢トップは13位のソニー
- 2025年上半期の半導体業界を振り返る
Special Site
- PR -

![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。