カップ1つ作るのに、ご主人様とメイドは4000回会話する:江端さんのDIY奮闘記 EtherCATでホームセキュリティシステムを作る(10)(6/8 ページ)
カナダ企業は装置に手を加えることなくコスト削減
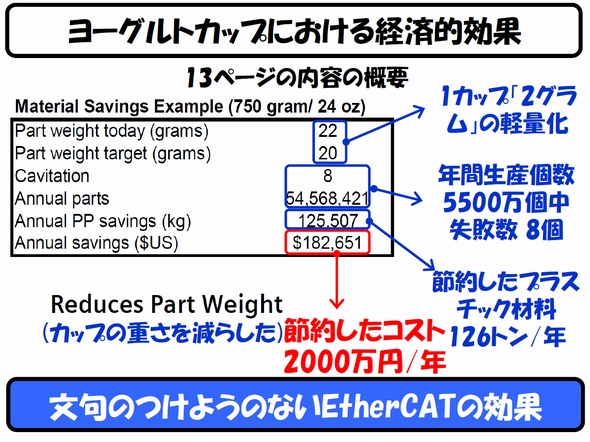
川野さん ハスキー社(Husky Injection Molding Systems/本社:カナダ)は、メカ製造に変更を加えずEtherCATの超高速制御だけで、この2000万円を捻り出したのです。
江端 一体どうやって……
詳しい内容は、こちらのPDFデータに記載がありますが、このPDFデータの27ページにあるグラフを使って簡単に説明します。
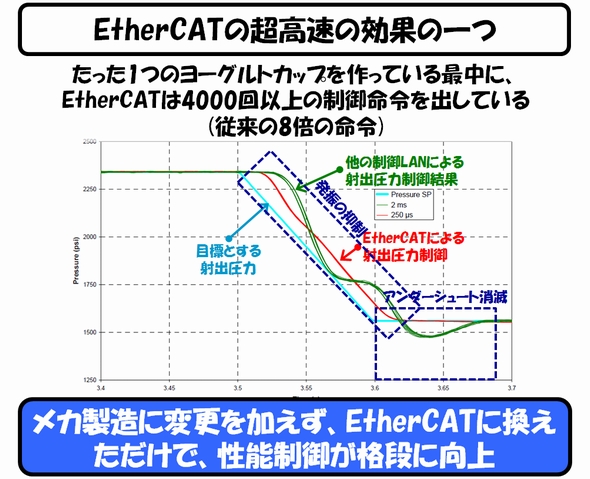
ヨーグルトカップを製造する場合、単にプラスチックを射出すれば良いわけではありません。
その射出する時間、速度、圧力を、そのタイミング毎に緻密に変化させながら、金型の中に満遍なく、同じ厚さ、密度でプラスチックを送り込み、そして、気泡(空気の泡)などを発生させてはなりません。

デコレーションケーキで、絞り袋を使って生クリームを飾り付けるときの、プロの技と同じです。
EtherCATは、わずか1個のカップを成形する間に、4000回も状況を取得し、4000回もコントロール(射出速度や圧力)を緻密に変化させ続けます。
これが従来(500回)の8倍もの細やかさで行われるのであれば、制御の精度がアップするのは当然です。
つまり、制御の世界において高速化は無条件に正義なのです。
さて、このヨーグルトカップにおけるEtherCATの超高速制御の成果は以下の通りです。
よくよく考えれば、「高速化」で悪いことなど1つもありません。
遅いものを速くすることはできませんが、その逆はいつだって簡単に実現できます。
今、EtherCATは100Mイーサネットを前提としていますが、これがギガビットイーサネットになれば、さらに1桁、制御の精度を上げることができます。現在の4000回の命令が、4万回になるということです。
従来、このような超高速のモーション制御というのは、制御LANにつながった専用制御ボード(FPGA)などで行われたものですが、恐ろしいことに、EtherCATはこのような「制御ボード」の世界までも喰い尽くす可能性があるのです。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- 2023年の世界半導体売上高ランキングトップ20、NVIDIAが初の2位に
- 中国政府の「Intel/AMD禁止令」、中国企業への強い追い風に
- 就業人員の4割が帰還組、ルネサス甲府工場が10年の時を経て再稼働
- 日本伝統の「和装柄」がヒントに 半導体の高度な熱管理につながる技術
- ルネサス甲府工場がいよいよ再稼働 柴田社長「パワー半導体の戦略的拠点に」
- Raspberry PiがAIカメラモジュール発売へ、ソニーのAI処理機能搭載センサー採用
- 半導体製造装置の販売額、2023年は1063億ドルで前年比1.3%減
- 「FinFETの終えん」に備える 今後10年でGAAへの移行が加速?
- Rapidus、シリコンバレーに新会社設立 AI半導体の顧客開拓を加速
- 2024年はDRAM/NAND市場が回復へ 需給バランスも正常化
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。