7つの海で大活躍、水中ロボット最新事情:フォトギャラリー(3/4 ページ)
フォーメーションを組んで、クラゲを退治
韓国のKAIST(Korea Advanced Institute of Science and Technology)の研究チームが開発した「JEROS(Jellyfish Elimination RObotic Swarm)」は、クラゲを駆除する海洋ロボットだ。JEROSは、グループを組んで作業し、韓国の沿岸水域に発生したクラゲを駆除する。クラゲは水難事故の発生要因となる上、水産業に経済的損失をもたらしている。JEROSの開発プロジェクトは2009年に始動し、2012年にフィールド試験を完了させている。
2013年後半には、JEROSにフォーメーションを組ませて、共同で作業しながら移動できるという機能を追加した。JEROSは、円筒形状の2つのフロート上に、クラゲを粉砕するための機器が搭載されていて、外観は超小型の双胴船のようだ。下側には、クラゲを捕獲するための水中網が取り付けられている。前進/後進だけでなく、360度の回転も可能だ。GPSと慣性航行装置を使って自律航行し、GIS(Global Information System)によってクラゲが大量発生している場所を特定する。先頭のロボットだけが、その場所への経路を把握していて、他のロボットはZigBeeで先頭のロボットと通信しながら後について航行するという。
 出典 KAIST
出典 KAIST体長20cmの魚型ロボット
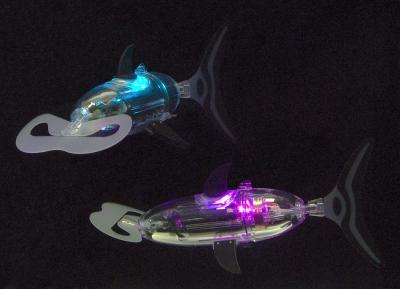
世界最小クラスの魚型ロボット「Jessiko」は、体長20cmと小さいが玩具ではない。前進/後進だけでなく、群れを成して泳ぐことができる。本体の前面に取り付けられた幅広いひれは、上下の動きを制御する。また、素早く振り動かすと後方向に進むことができる。尾びれはスピードを制御し、回転させることで本体を左右に動かす。背びれは、浮力を制御して上下の動きを調整する。二対の側ひれは、本体の安定性を維持する。
Jessikoは、光の反射を利用して障害物を検知し、他のJessikoとの位置関係を把握する。マイコンを2個搭載していて、あらかじめプログラムされた経路通りに泳ぐことが可能だ。バッテリ駆動時間も長い。用途としては、エンターテインメントや教育、生物学的研究などが想定されている。
 出典 Robotswim
出典 Robotswim8本の触腕を持つタコ型ロボット
欧州の研究コンソーシアムは、欧州委員会(EC)から資金提供を受けた「OCTOPUSプロジェクト」において、完全な軟体を実現したタコ型ロボットを開発した。最新の試作機は、柔軟性に優れた触腕を押し出すようにして前進する。この動きは、水泳ではスカーリングと呼ばれる。タコ型ロボットは、8本の触腕を特定のパターンに沿って動かしている。触腕でスカーリングすることで、最大体長比速度(体長の何倍進むか)0.2を達成したという。また、物をつかんだり、本物のタコにはできない“歩行”によって移動したりすることも可能だ。
同プロジェクトでは現在、体形を変化させることができるタコ型ロボットの開発も進めている。柔軟性が高いロボットは、そうでないロボットと比べてメリットが多い。例えば、体型を変形させることによって、限られた狭いスペースを通り抜けて移動できることなどが挙げられる。
 出典 OCTOPUS Project
出典 OCTOPUS ProjectCopyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- 重量はクジラ級! 超巨大な高NA EUV装置の設置をIntelが公開
- どうする? EVバッテリー リサイクルは難しい、でもリユースにも疑問
- パワー半導体向けウエハー市場、2035年に1兆円台へ
- 2023年の世界半導体売上高ランキングトップ20、NVIDIAが初の2位に
- 「GPT-4」を上回る性能で、グラフィカルな文書を読解するLLM技術
- Intelが高NA EUV装置の組み立てを完了、Intel 14Aからの導入に向けて前進
- 中国政府の「Intel/AMD禁止令」、中国企業への強い追い風に
- JDI、次世代有機ELディスプレイ「eLEAP」を24年12月に量産開始へ
- Intelの最新AI戦略と製品 「AIが全てのタスクを引き継ぐ時代へ」
- TSMC、24年Q1は増収増益 地震の影響は「最小限にとどまる」
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。