
東大発の自律型クアッドコプターはプログラマブルSoCで空を飛ぶ:組み込み開発ニュース
ザイリンクスは、東京大学大学院の研究グループ「フェノクス・ラボ」が開発した、小型で自律飛行可能なクアッドコプター「フェノクス」に、同社のプログラマブルSoC「Zynq-7000」が採用されたと発表した。
ザイリンクスは2014年11月11日、東京大学大学院の研究グループ「フェノクス・ラボ」が開発した、小型で自律飛行可能なクアッドコプター「フェノクス」に、同社のプログラマブルSoC「Zynq-7000」が採用されたと発表した。フェノクスの高度な画像処理による自己位置認識機能や、動きや音に反応して自律飛行する機能の実現に貢献したという。
フェノクス・ラボは、東京大学大学院工学系研究科航空宇宙工学専攻(知能工学研究室)に在籍するチーフ エンジニアの此村領氏と、インタラクション デザイナー エンジニアの三好賢聖氏の2人による研究グループ。フェノクス・ラボの研究は、情報処理推進機構(IPA)の「2013年度未踏プログラム」にも採択されている。
フェノクスは、外部からのコントローラを使わずに、安定して飛行することができる知能性や、搭載型のカメラとマイクを使って操縦者の動きに反応するインタラクティブ性、そしてLinuxベースのシステムをユーザー自身の手で書き換えられるプログラマブル性などの特徴を持つ自律飛行型のクアッドコプターだ。モーターからモーターまでのサイズは120mm、電池を含めた重量は60gと小型軽量である。2014年5月には、クラウドファンディングのKickstarterで、フェノクスプロジェクトを立ち上げるなどして注目を集めている。

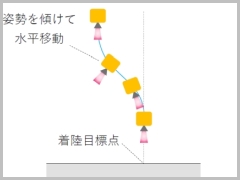
フェノクスの初期の試作機では、自己位置認識、モーター制御などの機能を、マイコンとザイリンクスのFPGA「Spartan-6」の組み合わせで実現していた。最新の機体では、ARMのアプリケーションプロセッサコア「Cortex-A9」をハードウェアマクロとして内蔵するZynq-7000に、これらの機能を実現するための回路を集約。高度な画像処理による自己位置推定、モーターの回転数制御、姿勢制御、音声認識などをリアルタイムで実現し、かつ、小型化と高性能化を実現したという。

フェノクス・ラボの此村氏は、「フェノクスの自律飛行は、カメラ画像の取り込みと特徴点の抽出、そしてその特徴点がどのようなものかを認識する処理回路を実装したFPGAが基盤になっている。Zynq-7000の登場でフェノクスの可能性が大きく広がったと感じている」とコメントしている。
関連キーワード
ザイリンクス | 東京大学 | FPGA関連 | クラウドファンディング | 組み込み開発ニュース | Kickstarter | 無人航空機(ドローン)
 性能と柔軟性を備える「Zynq-7000」ファミリを活用したソリューションの姿
性能と柔軟性を備える「Zynq-7000」ファミリを活用したソリューションの姿 ザイリンクスのプログラマブルSoC、2014年から量産車の車載カメラシステムに採用
ザイリンクスのプログラマブルSoC、2014年から量産車の車載カメラシステムに採用 ザイリンクス、従来のFPGAとは異なる新ブランド「Zynq」を発表
ザイリンクス、従来のFPGAとは異なる新ブランド「Zynq」を発表Copyright © ITmedia, Inc. All Rights Reserved.
Special Contents
- PR -


Special Contents 1
- PR -
Special Contents 2
- PR -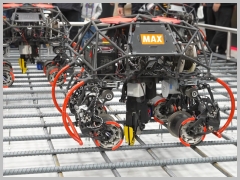

記事ランキング
- 講演会場が静まり返った――中国が生み出した衝撃のトランジスタ構造
- TSMCがGaN事業撤退へ、ロームは「さまざまな可能性を協議」
- 「DRAM生産の4割を米国で」 Micronを待ち受ける過酷な競争
- TSMCがGaNファウンドリー事業から撤退へ、NavitasはPSMCと提携で対応
- 26年度には世界大手の9割が採用、黒字化も 本格化するソニーの車載イメージセンサー
- 「光で剥離」 次世代半導体パッケージの歩留まりと生産性向上へ
- 25年Q1のファウンドリー市場は縮小緩やかも、Samsung/GFは大幅低迷
- 最大の壁、p層を克服!酸化ガリウムでFLOSFIAが達成した「世界初」
- 加速器を用いた「省電力次世代EUV露光技術」開発へ
- まるで「ぬかにクギ」 AIチップ規制で米国が抱えるジレンマ
Special Site
- PR -

![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。