コウモリは飛行ルートを“先読み”する、超音波で:ドローンなどの自律ロボットに応用へ(2/2 ページ)
» 2016年04月13日 09時30分 公開
[庄司智昭,EE Times Japan]
時間間隔による比較
計測したコウモリの飛行軌跡から飛行の選択的注意を、数理モデルを用いてパラメータ推定した結果、長い時間間隔で2匹の獲物を捕食したときの飛行軌跡は、獲物1に対する選択的注意にのみ基づき軌道が計画されていることが分かった(図3A)。
しかし、短い時間間隔で2匹の獲物を捕食したときは、コウモリが目前の獲物だけでなく次の獲物にも飛行中の注意を分散させていること、選択的注意の分散の割合は数値シミュレーションにおける最適値とほぼ一致したとする(図3C)。
つまり、コウモリは短い時間間隔で獲物を捕食するときは複数の獲物に対して注意を分散させ、それらの獲物を高確率で捕食できる飛行ルートを選択していたのだ。
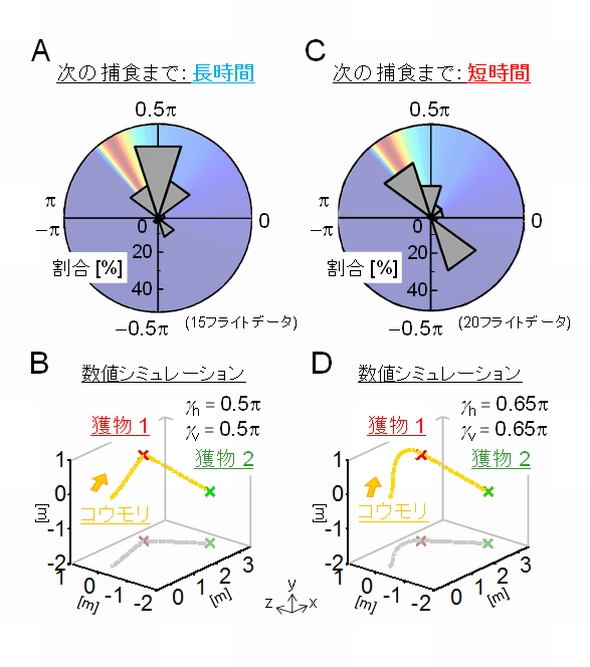 図3:計測したコウモリの飛行軌跡から飛行の選択的注意をパラメータ推定した結果(A、C)と数値シミュレーションの例(B、D) 出典:JST
図3:計測したコウモリの飛行軌跡から飛行の選択的注意をパラメータ推定した結果(A、C)と数値シミュレーションの例(B、D) 出典:JST高機能の飛行ドローンなどに応用へ
今回の研究成果は、アクティブセンシングで検知した複数の標的を効率的に捕捉するための軌道計画や、発展させた数理モデルを用いて自律移動を要するロボット技術分野(高機能の飛行ドローンなど)への応用が期待される。
同研究は、藤岡氏に加えて、同志社大学生命医科学部の飛龍志津子准教授、東京大学生産技術研究所の合原一幸教授らによる共同研究。日本学術振興会の科学研究費助成事業、科学技術振興機構(JST) 戦略的創造研究推進事業 個人型研究の課題「コウモリの生物ソナー機構に学ぶ、ロバストな実時間空間センシング技術の創出(飛龍志津子氏)」、内閣府の最先端研究開発支援プログラム(FIRST)などの一環で行われている。
関連記事
 レーザー照射で銅配線を形成、大気中で処理
レーザー照射で銅配線を形成、大気中で処理
芝浦工業大学の大石知司氏は、大気中で特定の銅錯体にレーザー光を当てるだけで、比較的簡単に微小な銅配線を形成できる技術を開発した。フレキシブルデバイスなどへの応用を進めていく。 負の磁気抵抗効果、非磁性の導電性物質で初観測
負の磁気抵抗効果、非磁性の導電性物質で初観測
物質・材料研究機構(NIMS)を中心とした研究グループは、非磁性の導電性物質であるパラジウム−コバルト酸化物に、「負の磁気抵抗効果」があることを発見した。普遍的な現象であることも確認した。新たなセンサー素子などの開発につながる可能性が高い。 Q値世界最高水準、光ナノ共振器の大量作製に成功
Q値世界最高水準、光ナノ共振器の大量作製に成功
大阪府立大学と産業技術総合研究所は2016年3月16日、150万の高Q値を持つ光ナノ共振器を大量作製することに成功したと発表した。 スマホの次なる認証手段は“耳の形”に?
スマホの次なる認証手段は“耳の形”に?
NECと長岡技術科学大学は、人間の耳穴の形状によって決まる音の反響を用いた生体認証技術を開発したと発表した。2018年度中の実用化を目指す。今後、スマートフォンの個人認証は、指紋やパスワードだけでなく「耳の形状」でも行われるようになるかもしれない。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- 重量はクジラ級! 超巨大な高NA EUV装置の設置をIntelが公開
- どうする? EVバッテリー リサイクルは難しい、でもリユースにも疑問
- パワー半導体向けウエハー市場、2035年に1兆円台へ
- 2023年の世界半導体売上高ランキングトップ20、NVIDIAが初の2位に
- 「GPT-4」を上回る性能で、グラフィカルな文書を読解するLLM技術
- Intelが高NA EUV装置の組み立てを完了、Intel 14Aからの導入に向けて前進
- 中国政府の「Intel/AMD禁止令」、中国企業への強い追い風に
- JDI、次世代有機ELディスプレイ「eLEAP」を24年12月に量産開始へ
- Intelの最新AI戦略と製品 「AIが全てのタスクを引き継ぐ時代へ」
- TSMC、24年Q1は増収増益 地震の影響は「最小限にとどまる」
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。