「タコ」なのか、柔らかロボを作り出す:化学で論理回路を実現(1/3 ページ)
米Harvard Universityの研究チームは、2016年8月24日、硬い部分を持たないタコ型のロボット「octobot」を試作したと発表。内部の化学反応によってエネルギーを得て自律的に動き、この化学反応が制御装置を兼ねていることが特徴だ。エンベデッド3Dプリント技術を応用して作り上げた。
「世界初の試み」
全ての部分を柔軟な材料で作り上げた自律動作するロボットだ。外部との有線接続もなく、容易に製造できる。ロボットとして世界初の試みだと自負している――米Harvard UniversityのEngineering and Applied Sciencesで、the Charles River Professorを務めるRobert Wood氏のコメントだ。
Harvard Universityの研究チームが試作したのは、全長数センチのタコ型ロボット「octobot」(図1)。8本の足を備える。
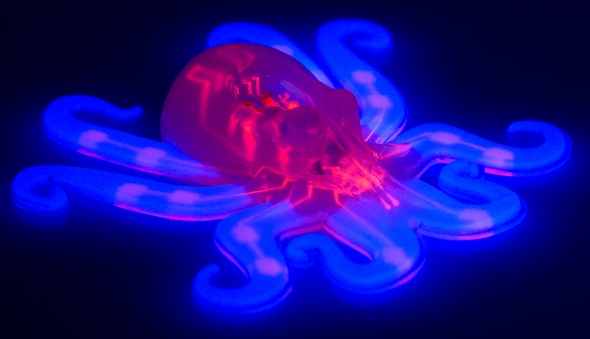 図1 タコ型ロボット「octobot」の外観 内部構造を示すため蛍光インクを加えたもの。制御部と作動に必要な回路が赤く、アクチュエーターを内蔵した足の部分が青く光っている 出典:Lori Sanders/Harvard University
図1 タコ型ロボット「octobot」の外観 内部構造を示すため蛍光インクを加えたもの。制御部と作動に必要な回路が赤く、アクチュエーターを内蔵した足の部分が青く光っている 出典:Lori Sanders/Harvard University自律動作するロボットというと、内部にモーターや制御基板、電池を内蔵したものが多い。硬い部品を一切使わない今回の開発品とは対極にある。研究チームは、柔軟なロボットの開発が進むことで、人とロボットの相互作用に革新が生まれると信じている。
なぜタコ型なのだろうか。タコはロボット研究者にとって魅力的な対象だからだ。力強く、それでいて器用に動く足(腕)を持っている。タコは骨格を持っていないため、非常に柔軟な動作が可能だ。これを再現したい。
燃料も自己完結する
octobotは単に柔らかいだけではない。外部の機器と接続していないという点が、特に新しいのだという。
研究チームはこれまでも、柔構造の本体と流体ネットワークを組み合わせたロボットの試作を進めてきた。ヒドロゲルや電気活性を持つポリマー、粒状の材料、弾性高分子材料などを用いてロボットの体を作り、内部に流体を通す管のネットワークを作り込む。外部から流体を流し込むことで、手や指が伸び、排出することで縮む動作が可能になる。
これは昔ながらのカエルの玩具と同じ考え方だ。手元のボールを握ることで、ゴムパイプでつながったカエルが跳ねる。
柔構造の部材だけを用い、内蔵電池や外部電源を利用しないロボットを作る手段はあるのだろうか。これまで、動力源としては単元推進薬(monopropellant)が役立つのではないかという指摘があった。しかし、試作例はない。
単元推進薬の利点は、例えばガソリンと酸素というように2種類の物質を用いた場合と比べて反応が単純になることだ。1種類の物質が分解することによって動力が得られる。octobotではこの技術を利用した。
50重量パーセントの過酸化水素(H2O2)水溶液*1)を単元推進薬として採用、微細な白金(Pt)触媒を用いた。触媒によって過酸化水素が水と酸素に分解し、体積が240倍に増加する。この圧力がロボットの動力となる(図2)。
*1) 過酸化水素水を単元推進薬として選んだのは、1g当たり1.44kJという高い化学エネルギー密度を備えているためだという。一般的な電池のエネルギー密度は、1g当たり0.1〜0.2kJである。
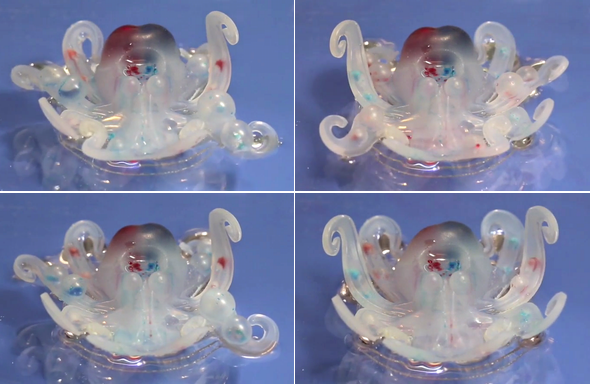 図2 正面から見たoctobotの足の動き 8本の足は4本ずつ2つの制御系統に分かれている(赤と青で示した)。まず赤系統の足が持ち上がり(左上)、次に青系統が動いた(右上)、再び赤系統(左下)に圧力が加わる。燃料貯蔵室の圧力が下がると、後ほど紹介する発振器が動作しなくなり、赤青両系統の足が同時に上がってしまう(右下) 出典:Lori Sanders, Ryan Truby, Michael Wehner, Robert Wood, and Jennifer Lewis/Harvard University
図2 正面から見たoctobotの足の動き 8本の足は4本ずつ2つの制御系統に分かれている(赤と青で示した)。まず赤系統の足が持ち上がり(左上)、次に青系統が動いた(右上)、再び赤系統(左下)に圧力が加わる。燃料貯蔵室の圧力が下がると、後ほど紹介する発振器が動作しなくなり、赤青両系統の足が同時に上がってしまう(右下) 出典:Lori Sanders, Ryan Truby, Michael Wehner, Robert Wood, and Jennifer Lewis/Harvard UniversityCopyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- 2023年の世界半導体売上高ランキングトップ20、NVIDIAが初の2位に
- 中国政府の「Intel/AMD禁止令」、中国企業への強い追い風に
- 就業人員の4割が帰還組、ルネサス甲府工場が10年の時を経て再稼働
- 日本伝統の「和装柄」がヒントに 半導体の高度な熱管理につながる技術
- ルネサス甲府工場がいよいよ再稼働 柴田社長「パワー半導体の戦略的拠点に」
- Raspberry PiがAIカメラモジュール発売へ、ソニーのAI処理機能搭載センサー採用
- 半導体製造装置の販売額、2023年は1063億ドルで前年比1.3%減
- 「FinFETの終えん」に備える 今後10年でGAAへの移行が加速?
- Rapidus、シリコンバレーに新会社設立 AI半導体の顧客開拓を加速
- 2024年はDRAM/NAND市場が回復へ 需給バランスも正常化
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。